Hallo
Als sensor gaan we het volgende gebruiken:
SMD component
Waarom infrarrood?
Volgens de opstelling die we gedaan hebben, zien we dat we perfect een verschil hebben van meetwaarde bij licht en donker reflectie.
En omdat ze dan in 1 SMD component zijn gegoten gaan we zeker en vast gebruiken.
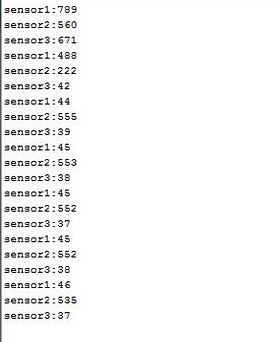
In de foto's zie je de opstelling en de uitmeting via Arduino naar pc toe.
wit: +/-37-45
zwart: +/-552
Dus is er een goed verschil tussen wit en zwart.
De opnemer is een fototransistor en dit is handig zodat we geen aparte versterking moeten plaatsen, het zit al intern in de fototransistor.
Berekening
programmacyclus
Gebaseerd
op volgende gegevens:
http://arduino.cc/en/Reference http://www.scribd.com/doc/117683149/Eindprogramma
Microcontroller:
http://be.farnell.com/atmel/atmega32u4-au/mcu-8bit-avr-32k-flash-usb-44tqfp/dp/1748525
Programmacyclus:
8
maal analogRead : 8 * 100 µs
Berekeningen
met marge: 800 µs
Totaal 1600
µs
Een
PID zijn eigenlijk een reeks berekeningen die niet veel tijd innemen,
vandaar een schatting van 800 µs.
De
wagen zal op het rechte stuk een maximale snelheid hebben van 1 m/s.
(= genomen met kleine marge)
Om
de afstand tussen 2 cyclussen te bepalen, doen we de snelheid maal de
cyclustijd.
Dat
geeft dus 1 m/s * 0,0016 s = 0,0016 m = 1,6 mm.
Dit
betekent dat het wagentje maximaal 1,6 mm verder is vooraleer de
volgende meting wordt gedaan.
Een
bocht met een straal van 10 cm kan hiermee dus makkelijk genomen
worden.
Als
de berekeningen kloppen van deze blog:
http://linefollowerhogent.blogspot.be/2012/10/verwerkingssnelheid.html
Ik
citeer: Dus de verwerkingsnelheid moet zeker onder de 4,08ms
liggen als de auto aan 2m/s rijdt.
Onze
wagen zal maar 1 m/s rijden, dus mag de verwerkingsnelheid 8 ms zijn.
Dit zal zeker niet het geval zijn, dus onze microcontroller is
geschikt.
We
hebben de microcontroller gekozen omdat hij een kloksnelheid heeft
van 16 MHz, hetzelfde als een Arduino Uno. Hij heeft genoeg analoge
ingangen voor onze sensoren, namelijk 12 en je kan hem programmeren
via USB. Dat laatste is zeer handig.
07-10-2013 om 00:00
geschreven door Kestens Joren