Dus de les was gestart en we begonnen direct met de robot te pakken en in actie te schieten.
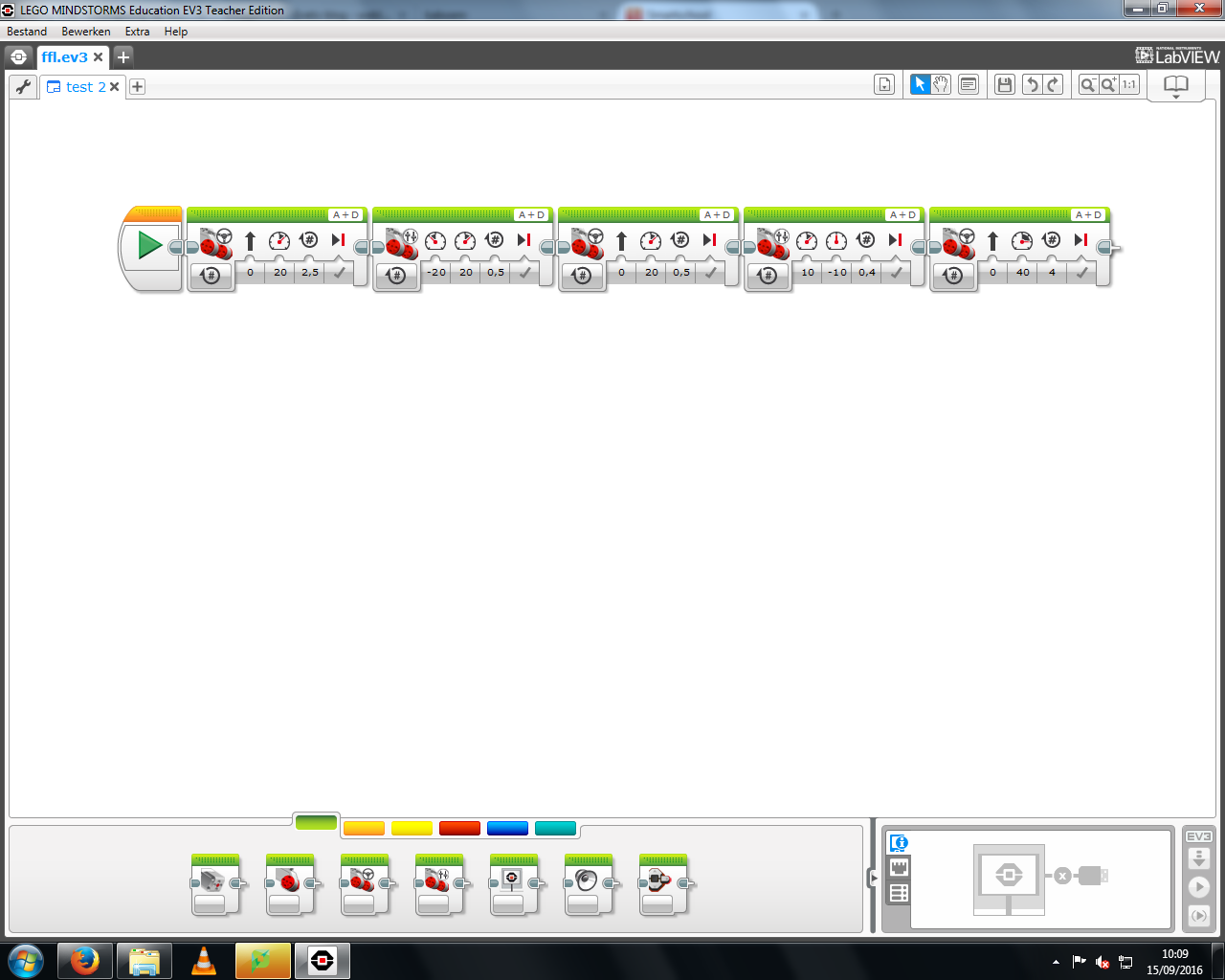
We gingen verder met waar we moeite mee hadden dat was de lijn volgen. Het lukte bijna tot de robot echt niet meer deed wat hij moest doen dus Lieven zei wij gaan nu blind rijden.
Daar is Lieven snel mee gestart en aan het einde van de les deed de robot eindelijk wat hij moest doen alleen nog terug rijden en misschien missie 3 als dat er nog in zit.
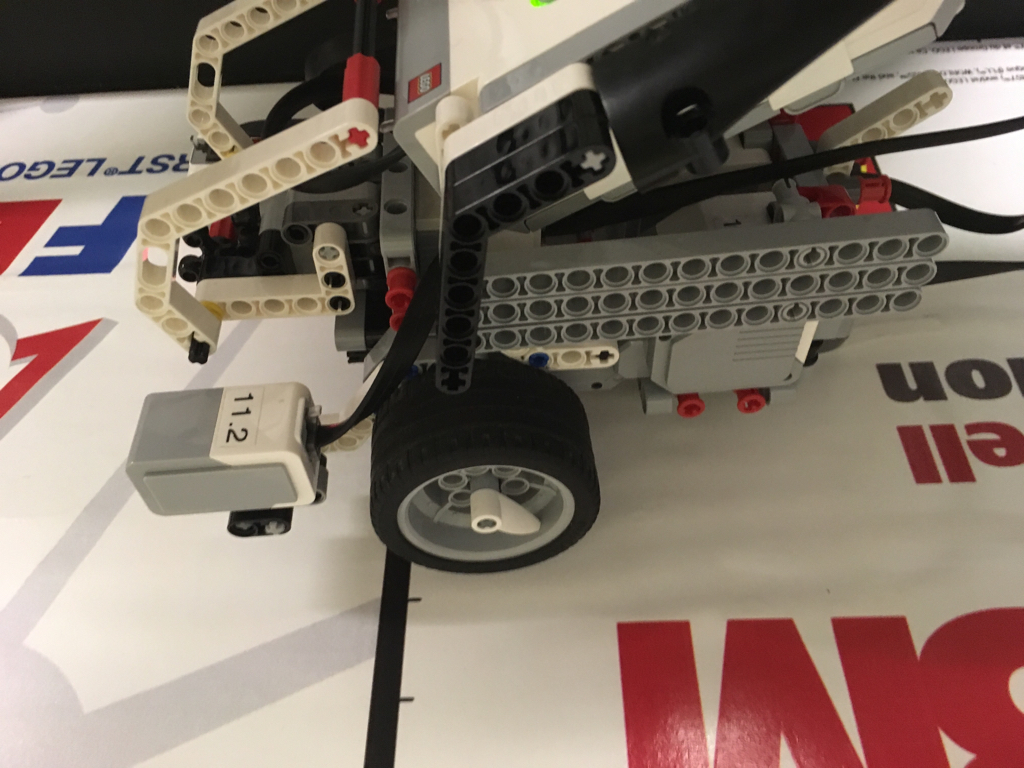
Dit was eigenlijk heel de les, ik heb deze week alleen nog een foto van de robot (maar hij ziet er eigenlijk nog steeds hetzelfde uit).
(Je moet even op de foto klikken om hem duidelijk te zien.)
Donderdag hadden wij onze 4 de les STEM programmeren dit jaar.
We zijn verder gegaan met waar we waren gebleven en dat was bijna bij de 2 de hindernis.
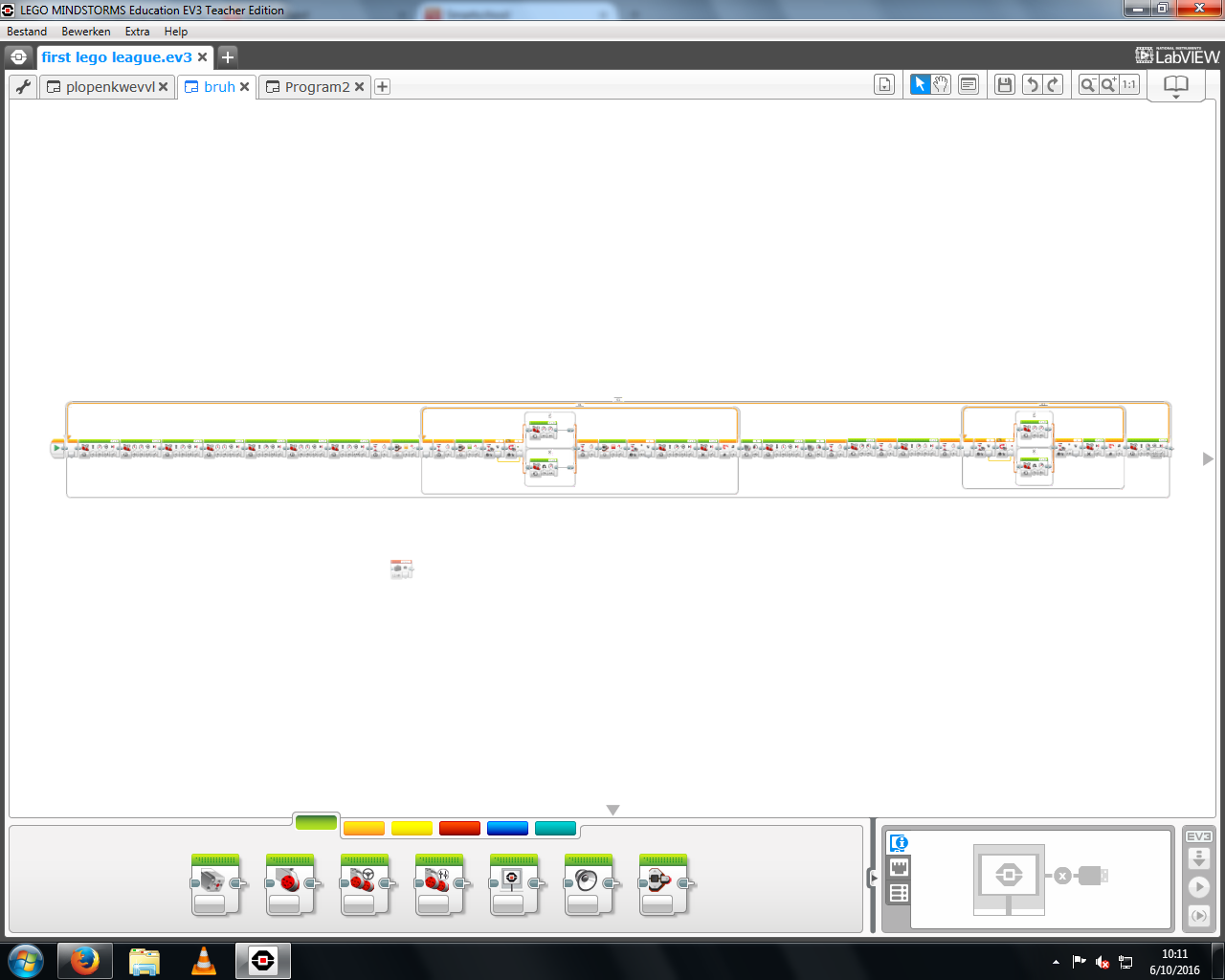
We zijn dus eerst een klein beetje verder geraakt totdat we een programma van vorig jaar boven haalden die hielp heel goed met waar we vast zaten nu rijd de robot niet heel de tijd blind.
Ik zet de robot zo goed als altijd klaar omdat ik weet hoe je hem precies moet klaarzetten en de rest van ons groepje niet, het begin bepaald heel veel over hoe de robot uiteindelijk zal rijden.
Hier heb ik nog 2 foto's van de banden hoe die moeten staan.
Samengevat hebben in het begin van de vooral gesukkeld en we zijn de les geëindigd met een heel moeilijk programma waardoor de robot minder blind rijdt.
Als laatste heb ik nog een foto van hoe de robot er nu eigenlijk uitziet.