Als eerste missie moet onze robot een doelpunt maken.
dit is niet zo gemakkelijk, want de robot moet eerst bij het doel geraken.
En daarna moet hij nog scoren.
Dit zijn de poorten die we gebruiken
DE SENSOREN
Gyrosensor in poort 2
Kleurensensor in poort 3
Ultrasonesensor in poort 4
Tastsensor in poort 1
DE MOTOREN
Mediummotor in poort A
Linkermotor in poort B
Rechtermotor in poort C
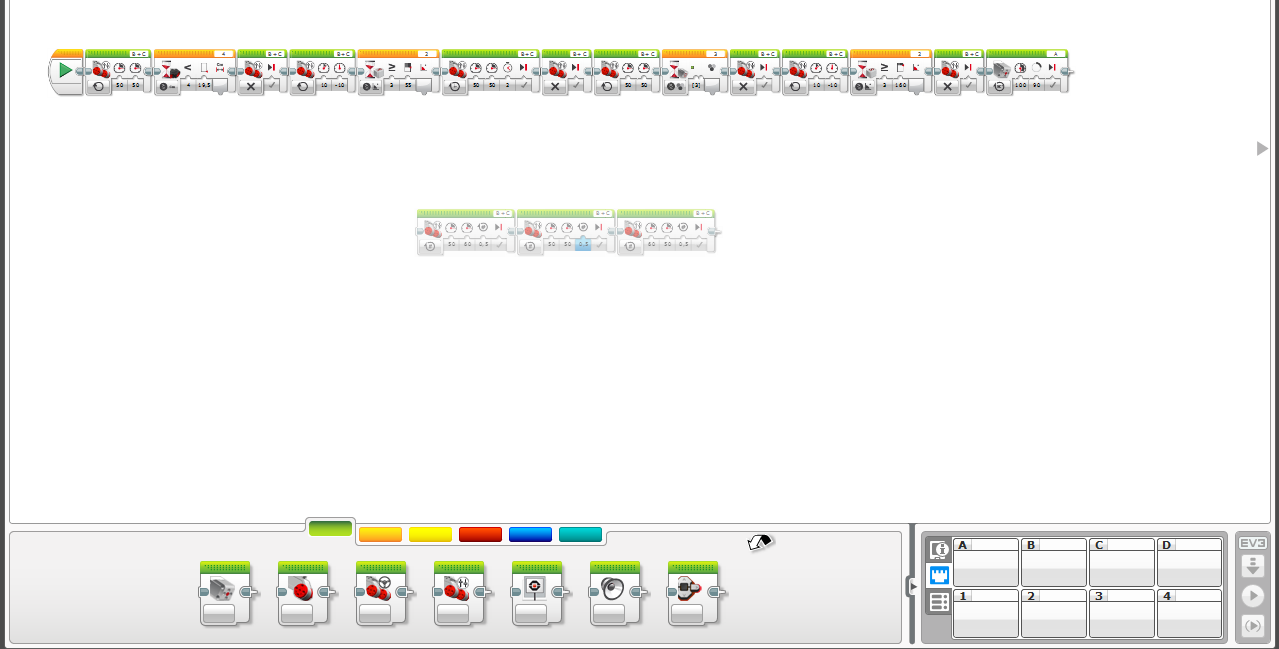
De flowchart, het filmpje van onze robot en de print screen van ons voorlopige programma heb ik toegevoegd bij bijlagen
Bijlagen:
FLOWCHART 2.pages (631.9 KB)
Knipsel programma.PNG (94.6 KB)
VID_20160920_133017.mp4 (8 MB)
21-09-2016 om 00:00
geschreven door Rune Verachtert 
0
1
2
3
4
5
- Gemiddelde waardering: 0/5 - (0 Stemmen)
|




{kind=link}