Onze eerste missie was eindelijk gelukt, dus we konden naar de tweede gaan.
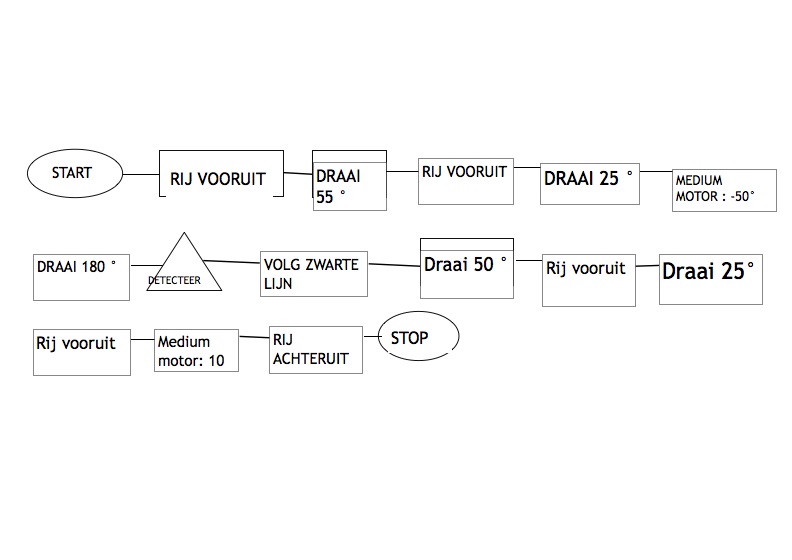
Voor onze tweede missie moet de robot een ring uit een doos nemen. Nadat hij naar de goal schiet (missie 1) rijdt hij door naar de doos. Onze robot had de ring bijna maar hij greep ernaast.
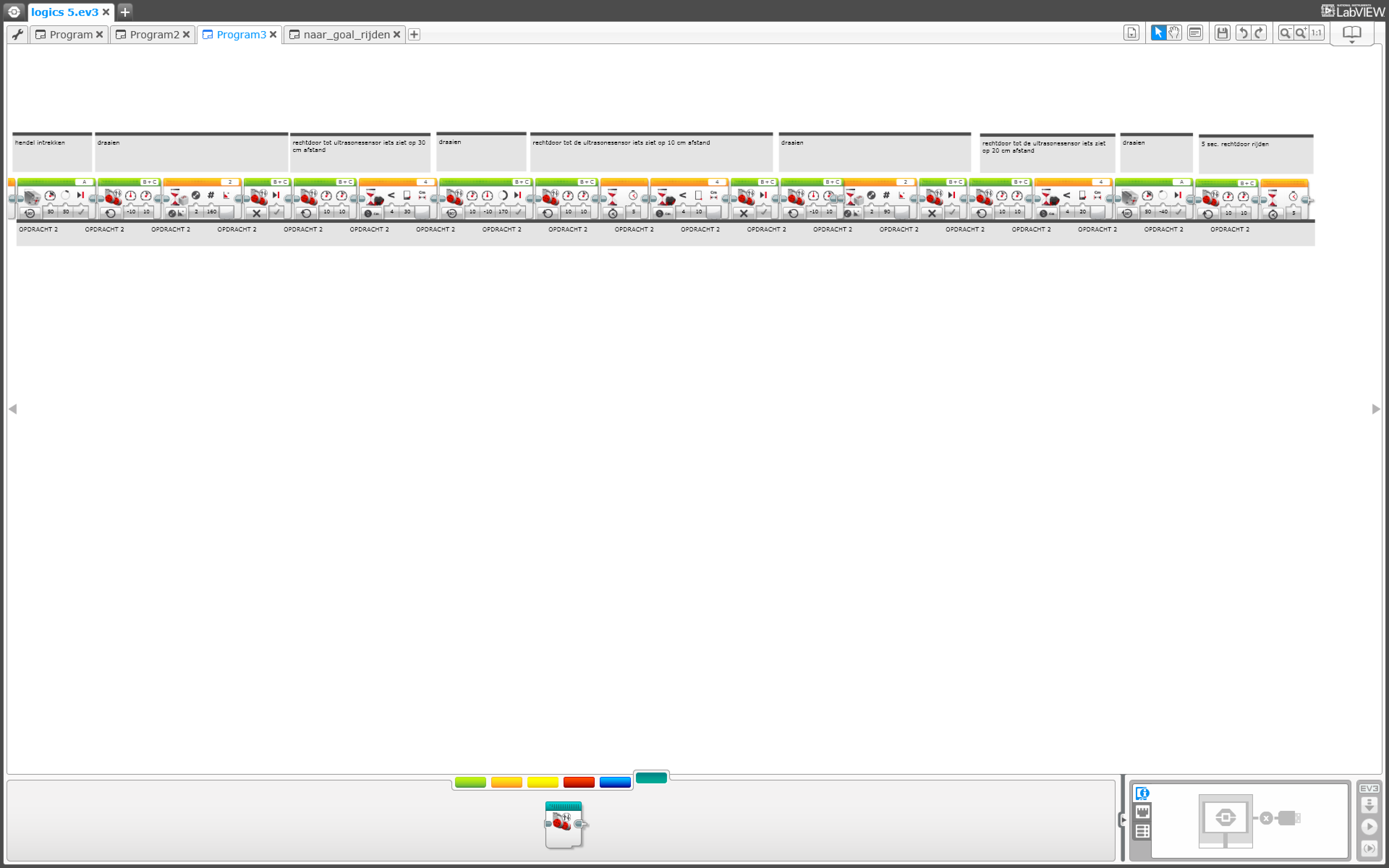
Hier is de flowchart en een screenshot van ons programma.





{kind=link}
{kind=link}