Vandaag was het eindelijk zover, onze Machine mochten we testen! We zijn wel niet over de heuvel geraakt, maar hebben wel kunnen rijden en onze balpen laten vallen. We zijn trots op ons 'kindje'.
Daarom besloten we om voor co-ouderschap te gaan! :) Met veel plezier nemen we hem elk op onze beurt eens mee naar huis!
Beste vrieden, dit is met spijt in het hart onze laatste update. Bedankt om ons te volgen!
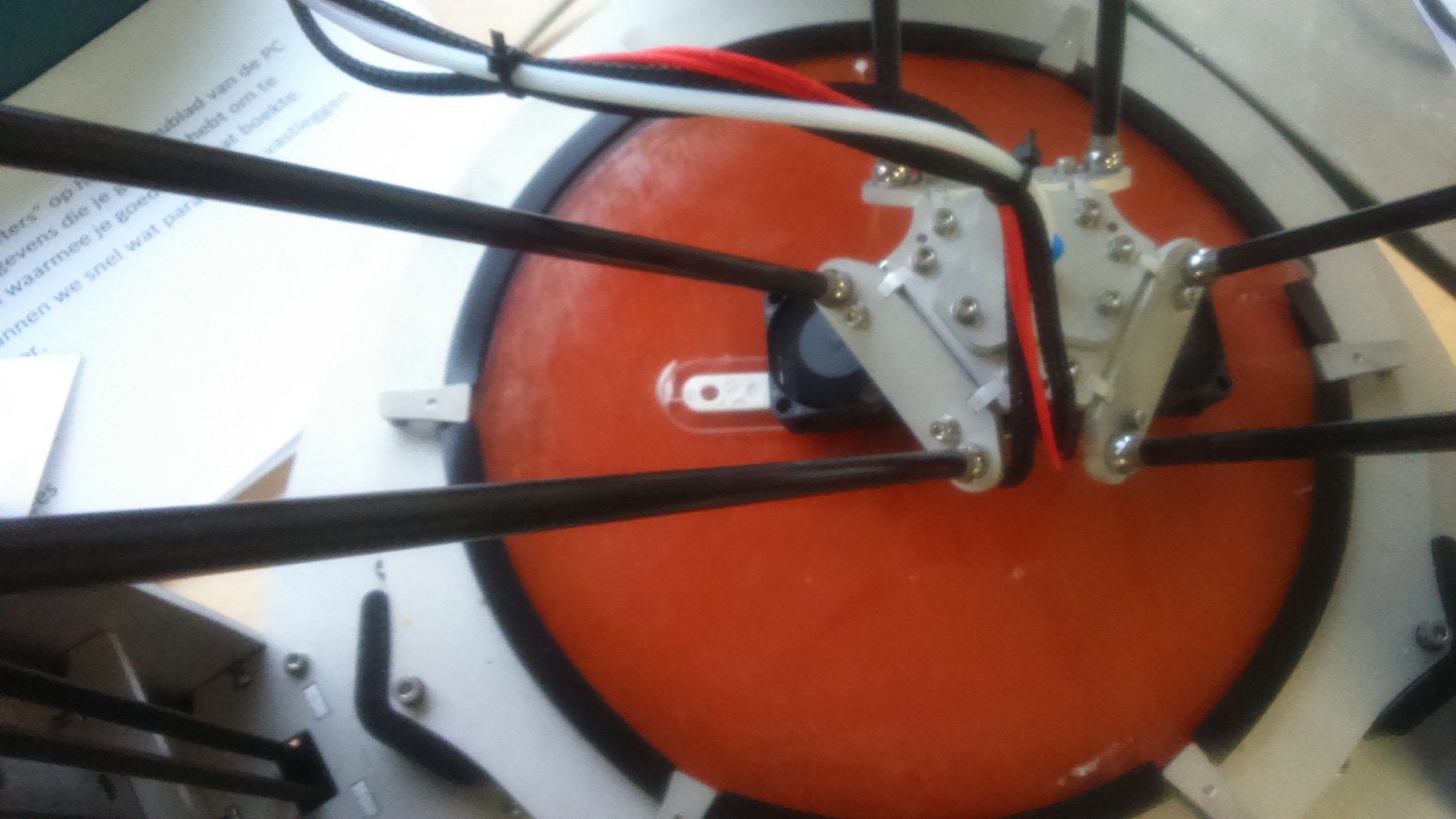
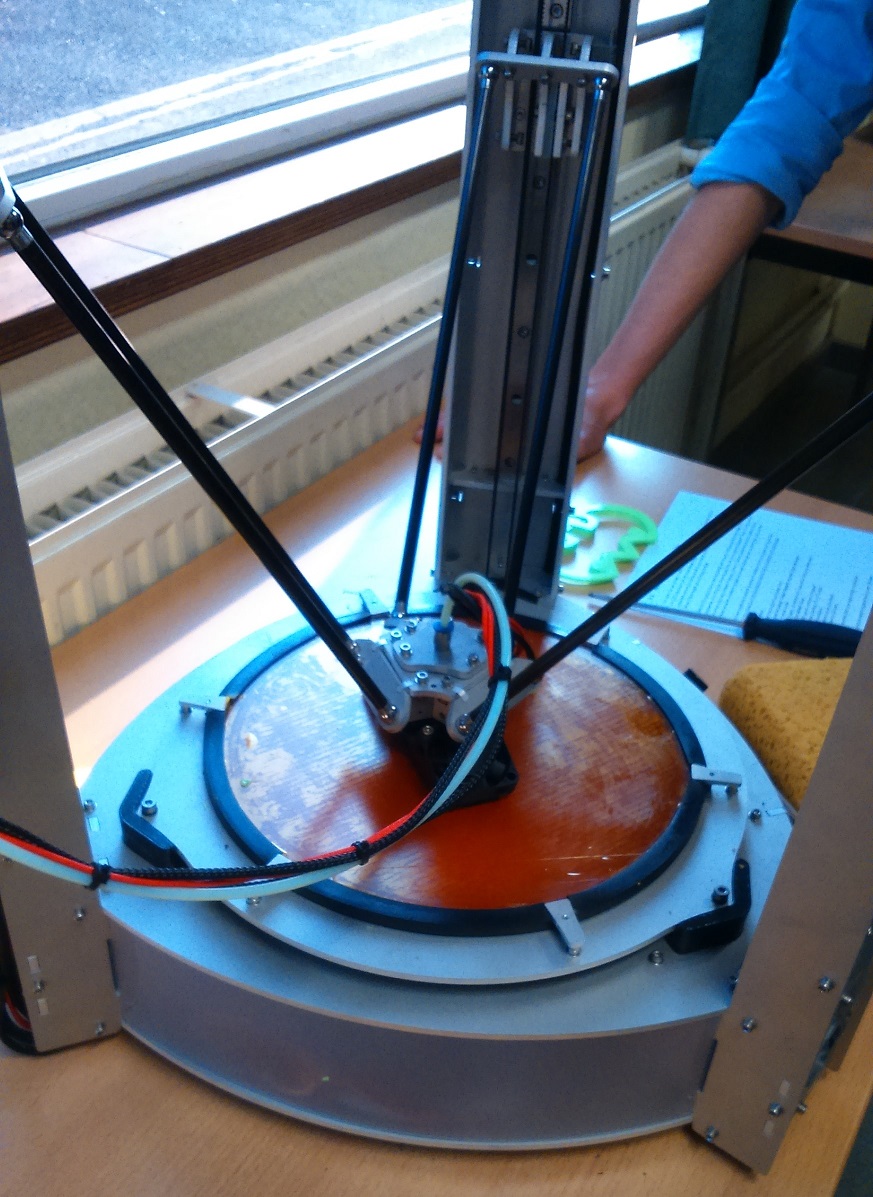
Vandaag hebben we nog enkele dingen samengesteld aan ons robotje. We hebben hem nu volledig samengesteld en we bekwamen volgend resultaat (zie foto's hieronder)
We zijn volop bezig met programmeren van de arduino We hebben er eerst heel wat problemen mee gehad, om te connecteren via bluetooth. Vandaag hebben we dan eindelijk een paar dingen kunnen testen. Nu woensdag komen we nog een keer samen om de laatste puntjes op de i te zetten.
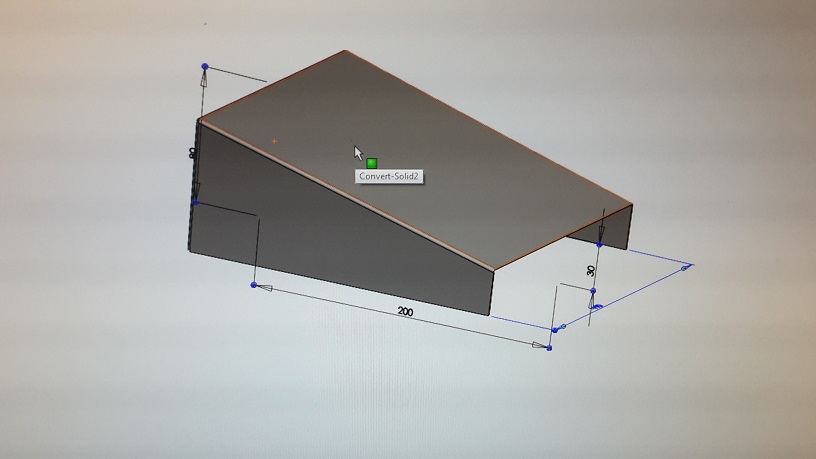
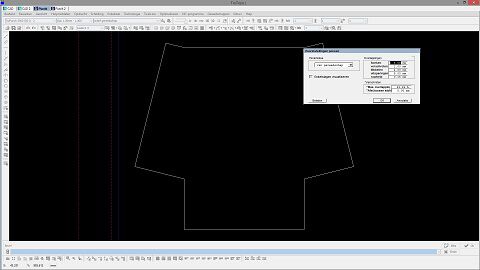
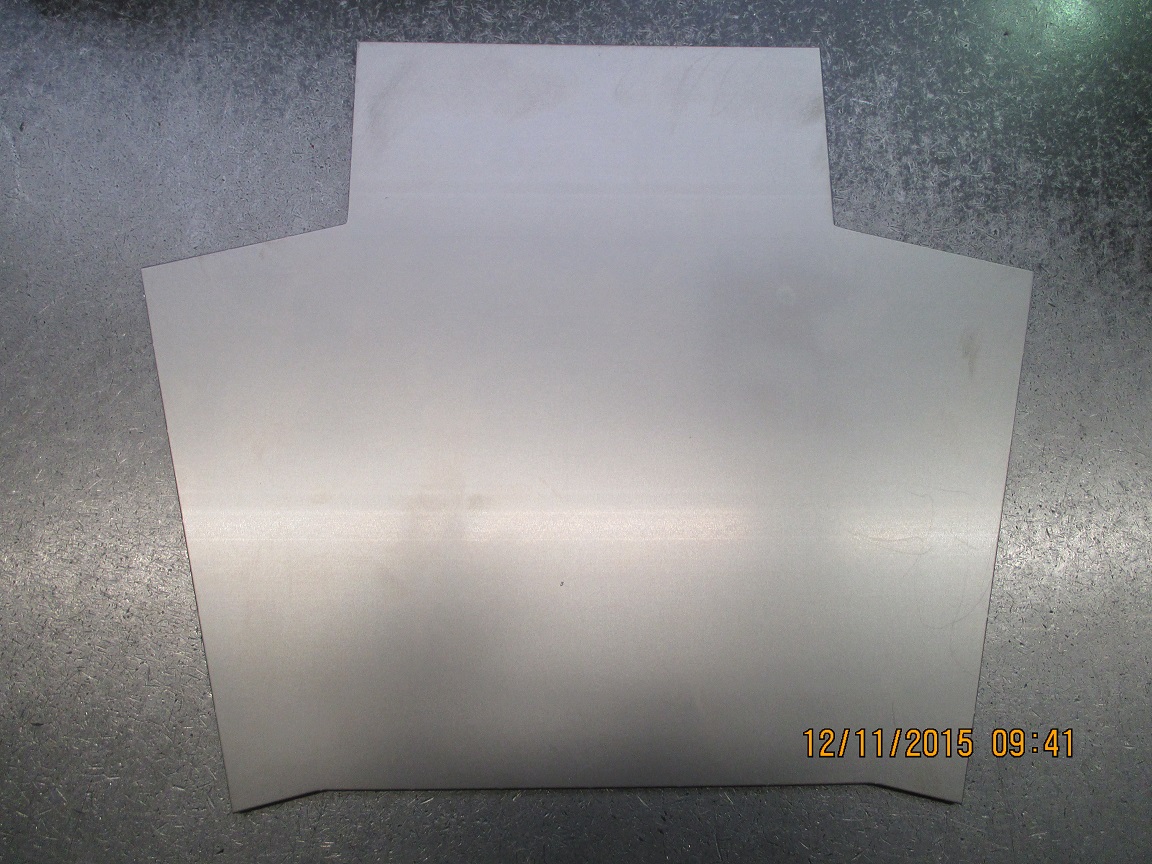
Ik sprak er in men vorig bericht over dat we de kipbak hebben laten maken bij Devos plaatbewerking. Wel hier volgen de verschillende stappen onderaan dit bericht de foto's in de volgorde van die stappen en ook nog het eindproduct.
Stap1: Wij tekenden de kipbak uit en stuurden hem door op papier. Zij tekenden hem over in hun tekenpakket.
Gisteren hebben we opnieuw 4 uren kunnen werken aan ons project.
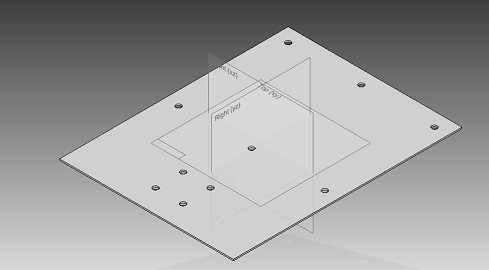
We hebben een onderplaat ontworpen en uitgelaserd met de lasercutter. Op die plaat bouwen we dan voort. We hebben al gaten voorzien voor de bevestiging van de wielen. Ook zijn we bezig met de cabine, die we uit hout gaan vervaardigen. De kipbak uit metaalplaat en die wordt momenteel geplooid en gelast bij Devos Plaatbewerking.
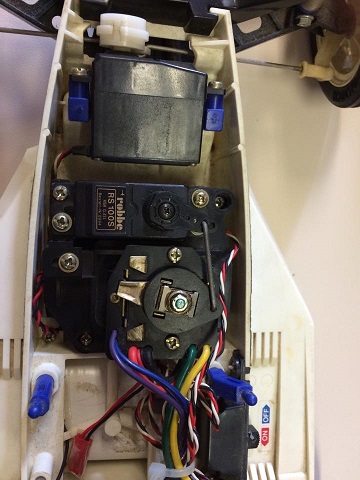
Voor de sturing van de wielen gebruiken we een tandlat met een servomotor.
Vandaag hadden we opnieuw praktijk, wat betekend: werken aan ons robotproject!
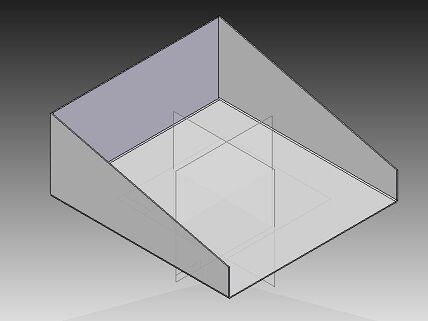
We hebben de onderplaat ontworpen, maar wachten nog om hem te snijden.De onderplaat wordt gemaakt uit PVC.
De valse bodem, waar alle elektriciteit en draden/besturingen onder komen, is al ontworpen, bijna uitgetekend en wordt gemaakt uit PVC.
Ook de bak, waar we de balpen mee vervoeren, is uitgetekend! We zullen deze plaat vervaardigen uit een plaat metaal en zullen deze plooien tot de gewenste vorm.
De cabine van onze mijnvrachtwagen wordt ook gemaakt uit datzelfde metaal en eveneens geplooid.
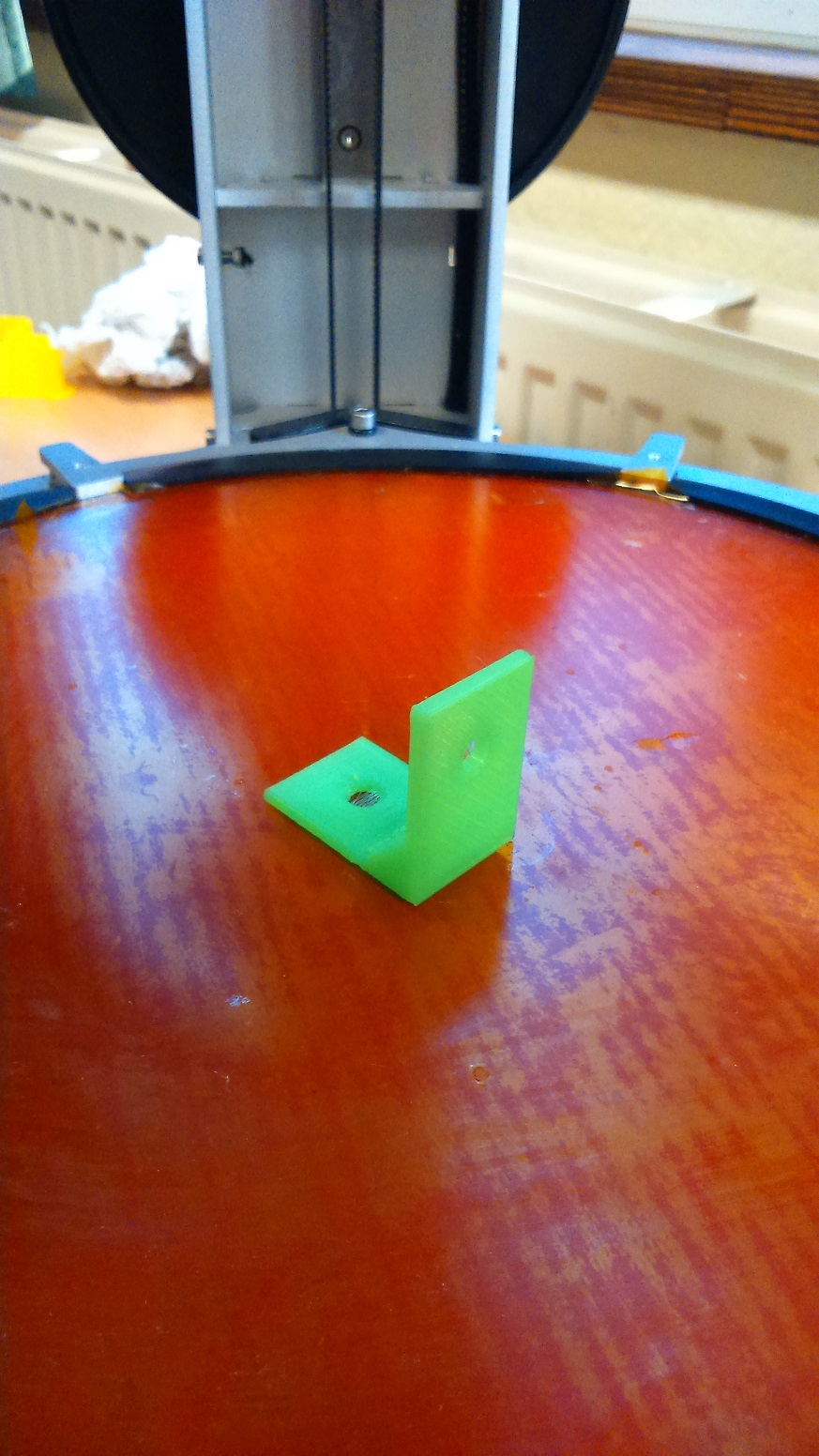
We hebben ook al 1 stukje 3D geprint (foto's onderaan). Dit stukje is een "zwee" om de platen van de verborgen bodem te bevestigen aan elkaar.
Zo we zijn al weer een stapje dichter bij ons project, maar we hebben nog altijd wat werk voor de boeg! Dus zullen er nog vele berichten volgen zodat jullie op de hoogte kunnen blijven van ons project.
Vandaag heeft Johannes een "testprogrammatje" gemaakt om te testen hoe dat befaamde "arduinobordje" echt werkt.
Hij sloot leds aan op de poorten waar normaal de motoren moeten komen. Door de pijl van de muis te bewegen van onder naar boven en andersom veranderde de lichtintensiteit en zo kunnen we ook het toerental van een motor regelen.
Vandaag hebben we dus weer mogen brainstormen voor ons robotproject.
We hebben ook wat RC-wagens meegebracht naar de laboles om er van alles uit te halen om te recupereren want we moeten ons project zelf financieren, dus is het belangrijk dat we zoveel mogelijk materiaal voor ons robotproject recupereren.
Uit die RC-wagens halen we een servomotor en banden.
Nu we dit al hebben, kunnen we beginnen denken over de onderplaat, die moet gelaserd worden.
Hoe zien we die, welke grote moet de onderplaat hebben?
We weten wel al dat we onze onderplaat boven de wielen zullen plaatsen om er zeker van te zijn dat de robotauto over de helling geraakt.










 Hallo
Hallo



{kind=link}
{kind=link}
{kind=link}