Donderdag 21 Mei hebben we de allerlaatste programeer dag gehad. We moesten niet meer zo veel doen alleen nog de puntjes op de I zetten. Maar dzt bleek nog al moeilijk. Het komt doordat we de afstanden niet kunnen uitrekenen want er klopt iets niet met de waarden heel raar en irritant. Maarja het is toch bijna gelukt dus. We hebben ook gewerkt aan nog een missie voor extra punten.
Vorige week heb ik niet zoveel gedaan want ik had nog een inhaalexamen van stem. Maar Klaas was er ook niet want ze hadden hem gevraagd te acteren voor een promotie filmpje. Maar Sam en Ward hebben het programma van het draai ding gemaakt. het werkte heel goed. Nadat Klaas en ik klaar waren hebben we nog wat geholpen. Dus het was een productieve dag.
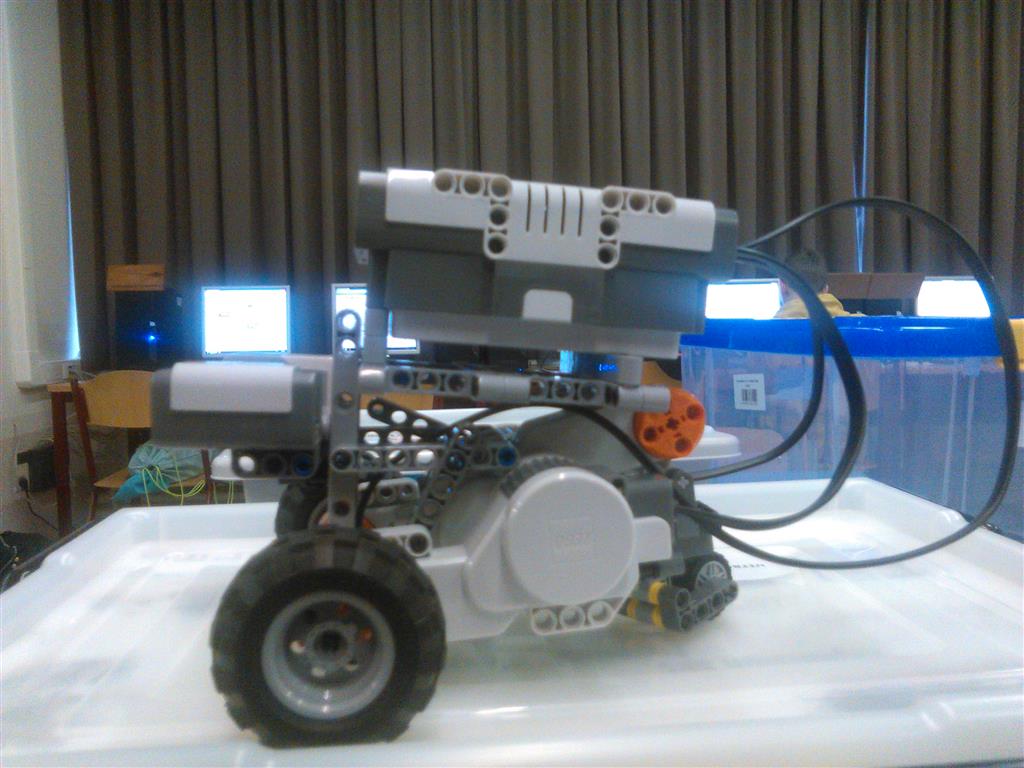
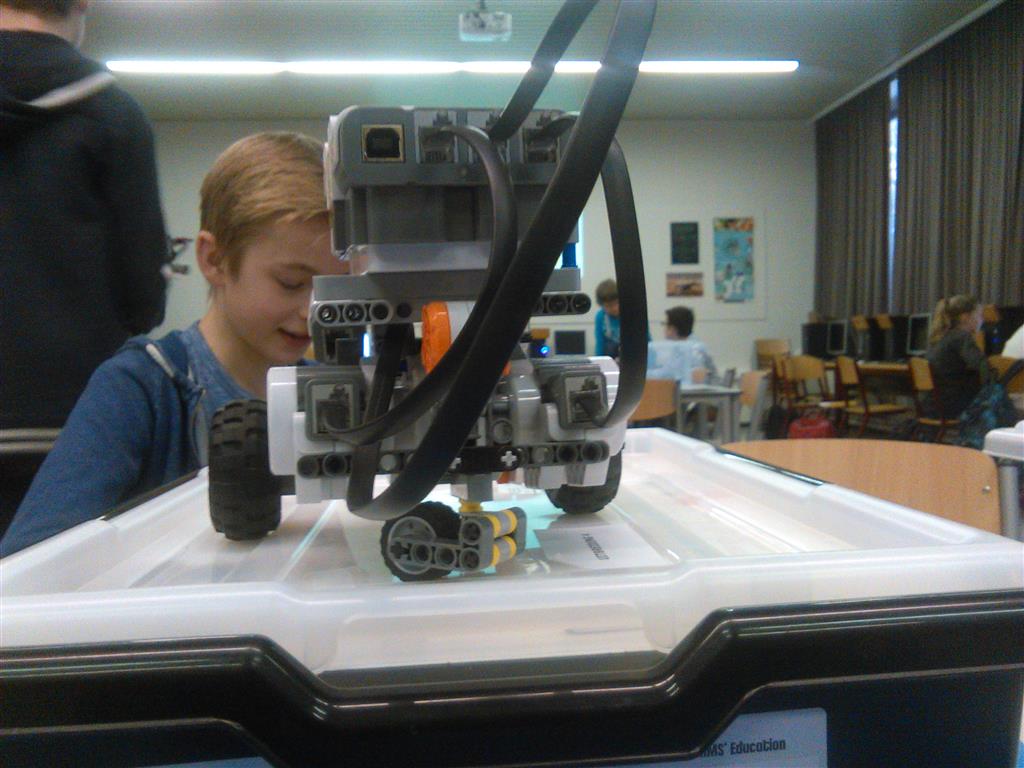
Sorry dat het zolang heeft geduurd maar hier is de lang verwachte blog. Ik heb het bloggen uit gesteld omdat ik niets anders gedaan heb dan de robot te bouwen. Het volgende bericht zijn er foto's. Wat ik nog gedaan heb is de mascotte gemaakt in tinkercad. zoals de foto's van de robot's zal ik die zetten in het volgend bericht. (Het volgende bericht zijn alleen foto's.)
Dit is de eerste blog het is heel erg verlaat, maar hij is er toch. Ik werk samen met Sam, Ward en Klaas aan een project voor STEM. Deze richting volg ik op school. In project gaan we eigenlijk een wedstrijd nabootsen genaamd FIRST LEGO LEAGUE. Hierbij moeten we drie missies kiezen uit een hele hoop anderen. Voor elke proof krijg je een aantal punten. Het doel is om zo veel mogelijk punten te verdienen. Wij hebben gekozen voor reverse engenering, zoekmachine, sport. Bij reverse engenering moet een robot tot een mandje rijden, het mandje oppakken en terug brengen naar de basis. Als het mandje terug in de basis is dan moeten we uit het mandje een klein lego bouwwerkje halen en het nabouwen. Daar krijgen we 45 punten als het ons lukt. Dan hebben we ook nog gekozen voor zoekmachine. Daarbij moeten we aan een radarwerk van tandwieltjes duwen en dan terug voor de zoekmachine gaan staan. Er is ondertussen een tandwiel gaan draaien dan zijn er nu een of twee kleuren zichtbaar. Als er één kleur zichtbaar is dan moet de robot die kleur uit de machine trekken, als er twee kleuren zichtbaar dan moet de robot de kleur uit de machine trekken die hij niet ziet. Daarna moet hij terug naar de basis.