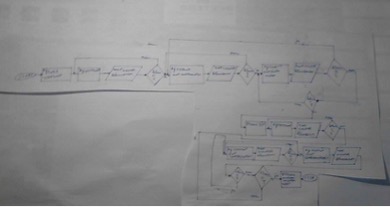
Onze robot doet heel de missie in tijd en de extra missie ikzelf heb de weg naar missie 2 en missie 2 en de weg terug naar de base gemaakt. In bijlage zullen flowcharts en filmpjes staan.
Een paar weken geleden zijn we begonnen met het programmeren van missie 2 leren op afstand. We hebben geprobeerd onze robot te programmeren om de zwarte lijn te volgen naar het begin van de missie. We hadden nog niet veel geoefend met labbiew dus dit was best moeilijk op het einde van de les was het half gelukt maar dan moest de robot nog verder rijden over een groene lijn en dat hebben we nog niet klaar gekregen dus zullen we hard moeten doorwerken aan missie 2. de foto's en flowcharts van deze missie zal ik morgen op mijn blog zetten.
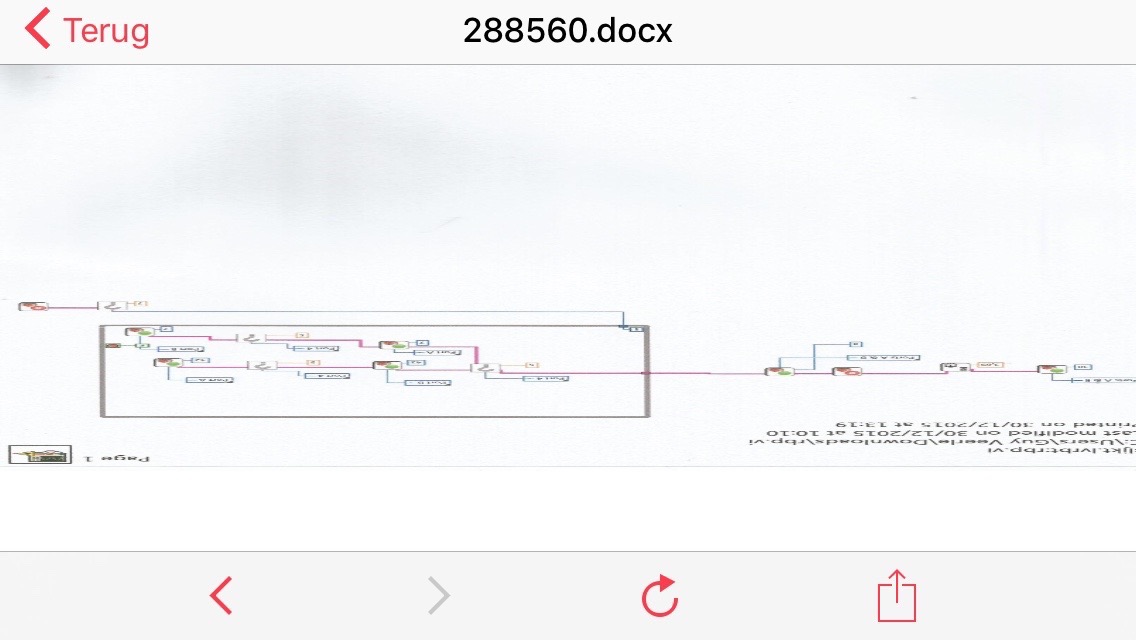
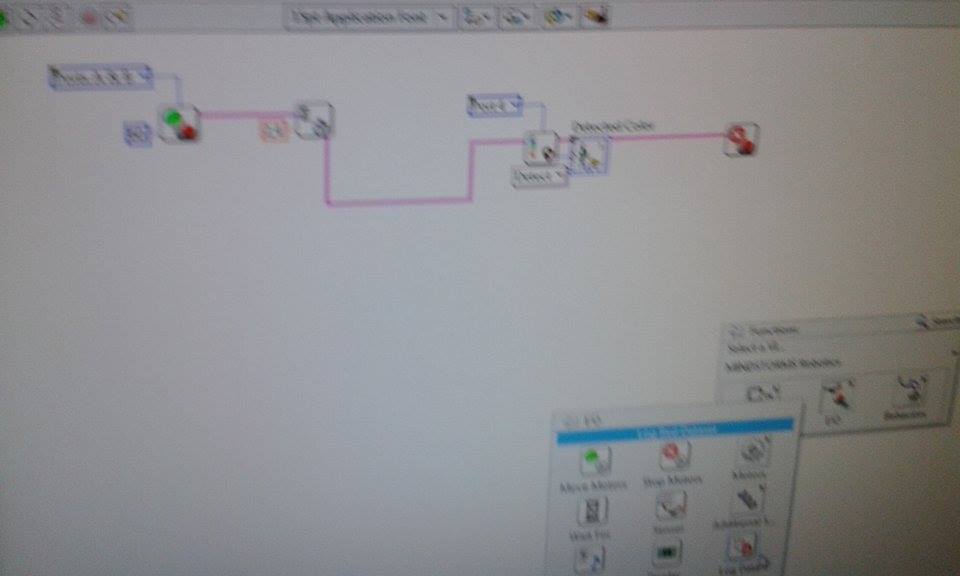
Hier is eenfoto van onze robot en het programma van onze eerste missie die we al gehaald hebben. we hebben onze 3 kleurensensoren in poort 1,2,4 zitten en een ultrasonesensor in poort 3
In les 2 van de FLL hebben we onze robot verder gebouwd en de eerste missie flexibiliteit geprogrammeerd dit is ons gelukt. Tijdens die les heb ik geprogrammeerd maar vooral ook mee gebouwd aan de bescherming voor de wielen want anders lukte nee missie niet zonder bescherming voor de wielen. Volgende les gaan we proberen de 2de missie te programmeren en morgen zal ik onze foto's van de robot en de flowcharts en programma's op mijn blog zetten.
Vandaag beginnen we met het maken en programeren van de robot voor de first lego league we hebben 3 opdrachten te voltooien van drie verschillende moeilijkheden
makkelijk: flexibliteit matig: leren van op afstand moeilijk: zoekmachine