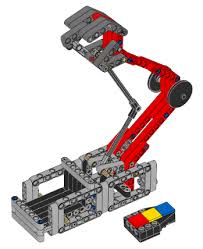
na en lange vakantie ( die veel te kort was) hebben we het werk hervat. ik heb al hard aan het 2de programma gewerkt en heb al 1 derde onder de knie gekregen. we hebben nog veel werk maar met mijn team zal alles snel klaar zijn. de poorten: -1: ultrasone sensor ( meet afstand) -a: medium motor -2: gyro sensor (meet hoeken) -b: large motor -3: kleurensensor ( meet geweerkaatst licht en welke kleur het is) -c: large motor -4:kleuren sensor
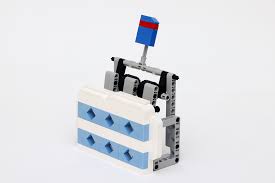
vadaag hebben we gewerkt aan opdracht 2 van de 3 de cloud opslag als je op mijn eerste bericht kijkt dan zie je het staan. de bedoeling is dat we drie staafjes in de gaten van het lego palet plaatsen, en hierdoor de chip in de lucht steken al bij al is dit een moeilijk tot gematigde oefening. mijn bijdrage tot nu toe zijn: -programma deur gemaakt -de robot (basismodel) -programma cloud (nog niet af) ons team is volop bezig met flowcharts te maken en de robot te verbeteren.
we zijn bezig met het tweede programma en de dockingstations zijn bijna af. ik denk dat we wel eens een kans kunnen maken om te winnen. tot volgende les beste bloggertjes
we zijn bijna klaar met het bouwen van de robot. het programma van de deur is al afgemaakt. en we gaan een dockingstation gebruiken om de verschillende opdrachten makkelijker uit te voeren.






){kind=link}