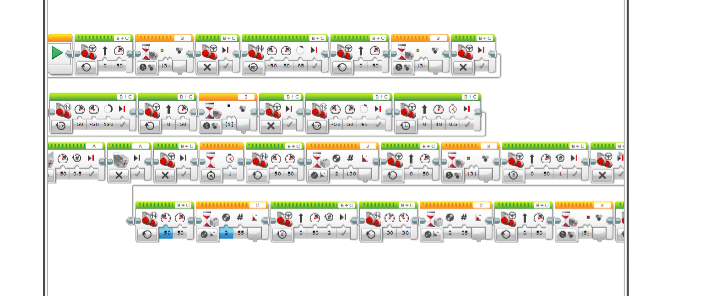
Ik heb de flowchart af. Ik ben best trots op mezelf want hij is misschien niet goed maar ik heb er moeite in gestoken ook zonder dat ik dat wou omdat ik al persoonlijk weet dat ik niet goed ben in flowcharts maken maar de rest was al druk genoeg bezig. hier nog een foto van mijn flowchart. Dit is van de tweede missie . Dit is de flowchart van het eerste programma
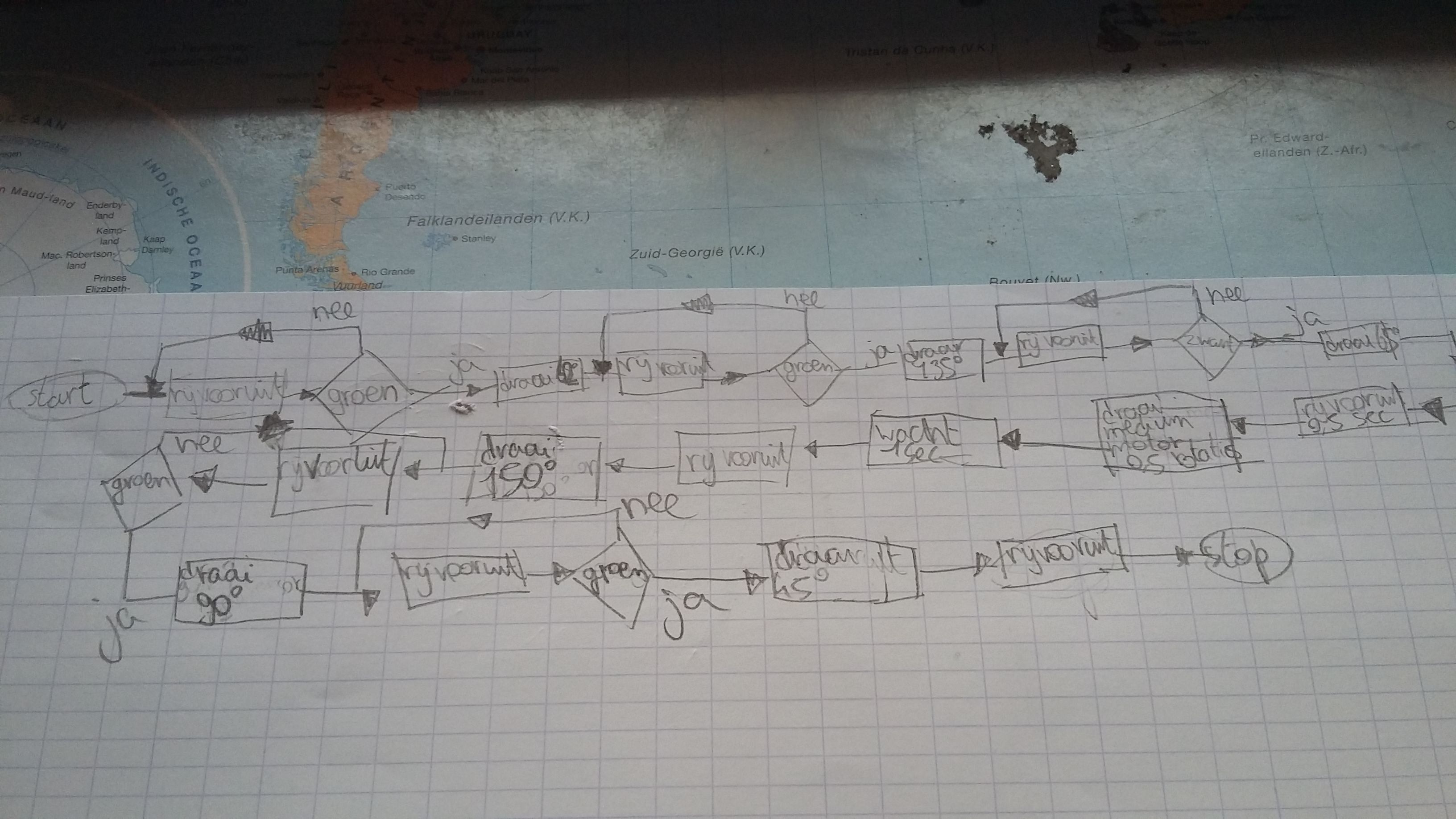
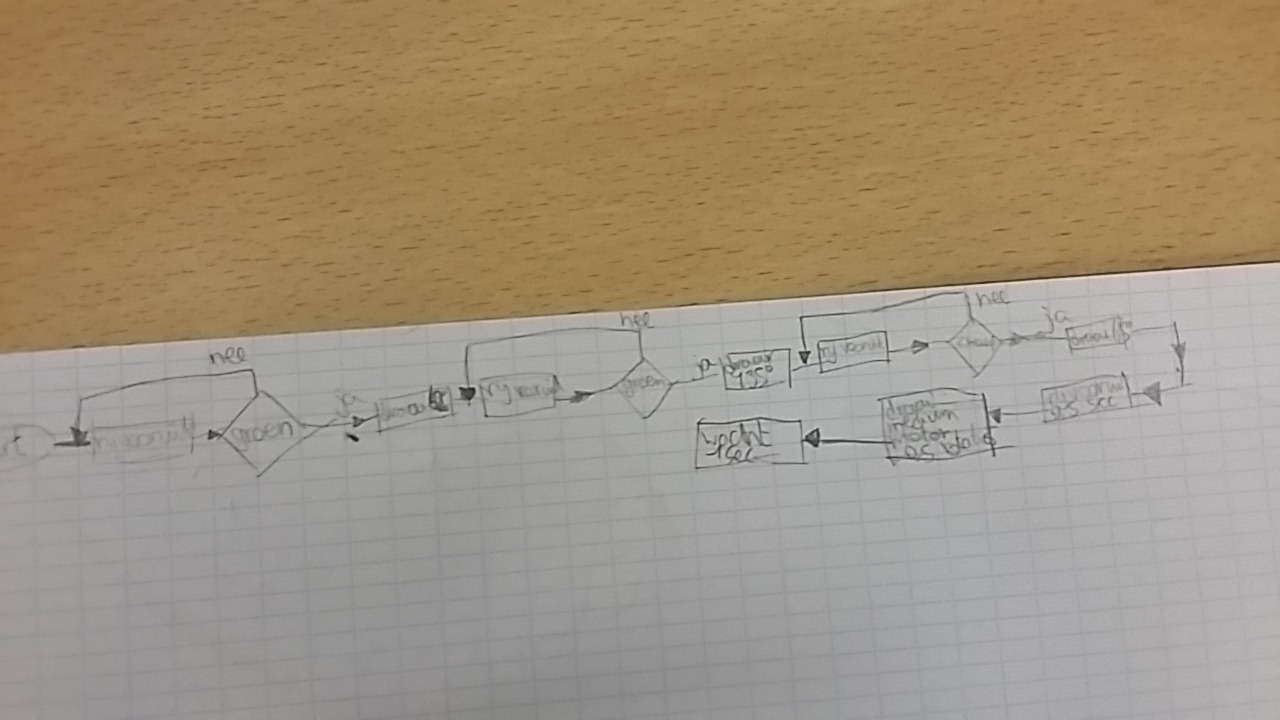
Ik ben nu bezig met de flowchart van de 2de missie hoewel de missie nog niet af is gaat het verassent goed. ik heb Bjarne en Jeroen nog een beetje geholpen met de afmeting van de banden die we altijd vergeten. Dit is een foto van de flowchart tot nu toe
Vanwege de melding dat ik duidelijker moet zijn. Gaan ik nu even uitleg geven over de robot en de missies. De robot: we hebben deze poorten gebruikt A: medium motor 1: / B: grote motor 2: gyrosensor C: grote motor 3: kleurensensor D: / 4: ultrasonensensor En nu onze missies: Missie 1 = is een gemakkelijke missie het heet 'flexibiliteit' en we moeten er voor zorgen dat deze constructie een kwartslag draait. Missie 2 = is een middelmatige missie deze heet 'gemeenschappelijk leren' en hier bij moeten wij er heen rijden een voorwerp uit de houder trekken en terug rijden. Missie 3 = is een moeilijke missie hij heet 'robotwedstrijden' bij deze missie moet de robot een element ophalen en in een mechanisme duwen om een voorwerp los te maken. Hierbij weet je onze gebruikte poorten en onze missies
Vandaag is de eerste evaluatie van ons project. We zijn al best wel goed op weg. Missie 1 is af ,missie 2 kunnen we er al heen gaan en 1 op de 10 keren kunnen we het plan uitvoeren en we zijn nu bezig om hem ook terug te laten gaan ,missie 3 is nogal moeilijk maar daar weet ik bijna niks van omdat ik vooral gefocust ben op missie 2.
Op dit moment is iedereen een beetje onrustig omdat die dat deed en de andere deed dat maar dat maakt niet veel uit want alles is weer goed aan het gaan. Bij de middelmatige opdracht kan de robot al naar de opdracht toe rijden nu moeten we er nog voor zorgen dat hij de opdracht uitvoert en terug rijdt.
De eerste missie is af. Het was gewoon meten en dan programmeren en omdat daar maar een persoon voor nodig was heb ik niks gedaan en daarom ben ik nu bezig met de middelmatige missie samen Arne en Seppe. We gaan het proberen met een kleuren sensor en als dat niet werkt hebben we al gemeten hoeveel hij moet vooruit rijden en zo door.
Ik en Indi een teamgenoot van mij gaan beginnen aan missie 1 en dat is de gemakkelijke missie. Wij als team hebben 3 missies , een gemakkelijke, een middelmatige en een moeilijke. En wij doen de makkelijke.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}